Research
TwinkleBall

start from 2008
TwinkleBallは、サウンドメディアを表現するためのボール型インターフェースです。従来のデジタル楽器の音は、それの形状に依存しています。演奏の自由度は、その形状によって制限されています。よって、ダンスなどの体による表現では演奏することはできません。自由なパフォーマンスを実現するために、ボール型インターフェースのTwinkleBallを製作しました。TwinkleBallの仕組みは、(1)握力を検出し、光の強さへと変換するためのフォトセンサが透明なゴム球に入っており、(2)動きを検出するために、加速度センサも入っています。これらのセンサによって、握力や動きの変化によってノートやテンポを制御できます。TwinkleBallの特徴は、ボール型で、発光し、ワイヤレスで手持ちサイズであることです。それにより、TwinkleBallは、ダンスなどの身体表現から音を生み出します。
Yamaguchi, T. Kobayashi, A. Ariga, S. Hashimoto, “TwinkleBall: A Wireless Musical Interface for Embodied Sound Media,” Proc. of New Interfaces for Musical Expression (NIME 2010), pp.116-119,Australia, Jun. 2010.
T. Yamaguchi, S. Hashimoto, “Grasping Interface with Photo Sensor for a Musical Instrument,” Proc. of the 13th International Conference on Human-Computer Interaction (HCI International 2009), pp. 542–547, USA, Jul., 2009.
Yamaguchi, T. Kobayashi, A. Ariga, S. Hashimoto, “TwinkleBall: A Wireless Musical Interface for Embodied Sound Media,” Proc. of New Interfaces for Musical Expression (NIME 2010), pp.116-119,Australia, Jun. 2010.
T. Yamaguchi, S. Hashimoto, “Grasping Interface with Photo Sensor for a Musical Instrument,” Proc. of the 13th International Conference on Human-Computer Interaction (HCI International 2009), pp. 542–547, USA, Jul., 2009.
AttractiveEye

start from 2008
AttractiveEyeは、ロボットが見ているものを特定できるロボットアイです。人は、視覚入力のメカニズムを持っていますが、視覚信号の出力メカニズムはジェスチャーぐらいしか持っていません。AttractiveEyeは、物体の色に合わせてその色を変化させることにより、対象の色の情報を伝えます。このロボットの色を見れば、私たちが見ている対象を特定できます。AttractiveEyeの仕組みは非常にシンプルで、発光素子とカメラセンサによって構成されています。人とロボットの相互作用実験によって、人とロボットとの相互作用が容易になったことが証明されています。
T. Yamaguchi, S. Hashimoto, “AttractiveEye: Augmented Gaze Representation for “What is the robot looking at?””, Proc. of IEEE International Conference on Robotics and Automation (ICRA2009), pp.2289-2294, Japan, May 2009.
T. Yamaguchi, S. Hashimoto, “AttractiveEye: Augmented Gaze Representation for “What is the robot looking at?””, Proc. of IEEE International Conference on Robotics and Automation (ICRA2009), pp.2289-2294, Japan, May 2009.
Visual Inspection System on the Concrete Surface

start from 2004
自動画像解析の診断の応用として、画像処理と画像計測を用いたひび割れ検査が提案されています。コンクリート表面の保全と診断において、構造物の安全性を確保するためには表面のひび割れ検査が重要です。亀裂幅はコンクリート表面の耐久性および劣化を評価するために用いられる特に重要なパラメータです。亀裂検査のための多くのアプリケーションやシステムが開発されていますが、実際には亀裂幅を正確に測定することは容易ではありません。
+そこで私たちは亀裂の自動検出と自動測定方法を開発しました。 +正確な尺度で亀裂幅を測定するために、撮影可能なプレートに固定されたコンクリート表面にひび割れスケールを固定しました。実際のコンクリート表面において実験を行い、システムの性能を評価し、実用上の信頼性を検証しました。
T. Yamaguchi, S. Hashimoto, “Fast crack detection method for large-size concrete surface images using percolation-based image processing,” Machine Vision and Applications, Feb. 2009.
T. Yamaguchi, S. Nakamura, R. Saegusa, S. Hashimoto, “Image-based crack detection for real concrete surface”, IEEJ Transactions on Electrical and Electronic Engineering, Vol.3, No.1, pp.128-135, Jan. 2008.
T. Yamaguchi, S. Hashimoto, "Practical image measurement of crack width for real concrete structure," Electronics and Communications in Japan, vol.92 Iss.10, pp.1-12, Sep. 2009.
T. Yamaguchi, S. Hashimoto, “Image processing based on percolation model,” IEICE Transactions on Information and Systems, Vol.E89-D, No.7, pp.2044-2052, Jul. 2006.
T. Yamaguchi, K. Suzuki, P. Hartono, S. Hashimoto, “Percolation approach to Image-based crack detection,” Proceedings of the 7th international conference on Quality Control by Artificial Vision (QCAV2005), pp.291-296, Japan, May 2005.
T. Yamaguchi, S. Hashimoto, “Fast crack detection method for large-size concrete surface images using percolation-based image processing,” Machine Vision and Applications, Feb. 2009.
T. Yamaguchi, S. Nakamura, R. Saegusa, S. Hashimoto, “Image-based crack detection for real concrete surface”, IEEJ Transactions on Electrical and Electronic Engineering, Vol.3, No.1, pp.128-135, Jan. 2008.
T. Yamaguchi, S. Hashimoto, "Practical image measurement of crack width for real concrete structure," Electronics and Communications in Japan, vol.92 Iss.10, pp.1-12, Sep. 2009.
T. Yamaguchi, S. Hashimoto, “Image processing based on percolation model,” IEICE Transactions on Information and Systems, Vol.E89-D, No.7, pp.2044-2052, Jul. 2006.
T. Yamaguchi, K. Suzuki, P. Hartono, S. Hashimoto, “Percolation approach to Image-based crack detection,” Proceedings of the 7th international conference on Quality Control by Artificial Vision (QCAV2005), pp.291-296, Japan, May 2005.
SIEN

start from 2007
SIENは、クライミングロボットの壁の凹面、凸面、または不十分な接着による落下を防ぐ新しい安全対策コンセプトを提示するものです。私たちが開発したクライミング支援ロボットSIENは、伸縮アームを用いてクライミングロボットを支援します。アームには、クライミングロボットの速度と移動方向を検出するためのセンサーが装着されています。SIENは検出された力のフィードバックに基づいてクライミングロボットに追従し、支持します。実験結果より、SIENはクライミングロボットが壁を確実に安全に登ることを可能とすることが証明されました。
T. Yamaguchi, Y. Sorioka, S. Paku, S. Hashimoto, "SIEN: Telescopic-Arm Climbing-Support Robot," Journal of Robotics and Mechatronics, vol.21, no.5, pp.621-627, Nov. 2009.
Y. Sorioka, T. Yamaguchi, S. Hashimoto, “Development of a Telescopic-Arm Type, Climbing Support Robot,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2008), pp.1818-1823, Thailand, Dec. 2008.
T. Yamaguchi, Y. Sorioka, S. Paku, S. Hashimoto, "SIEN: Telescopic-Arm Climbing-Support Robot," Journal of Robotics and Mechatronics, vol.21, no.5, pp.621-627, Nov. 2009.
Y. Sorioka, T. Yamaguchi, S. Hashimoto, “Development of a Telescopic-Arm Type, Climbing Support Robot,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2008), pp.1818-1823, Thailand, Dec. 2008.
GoStuck
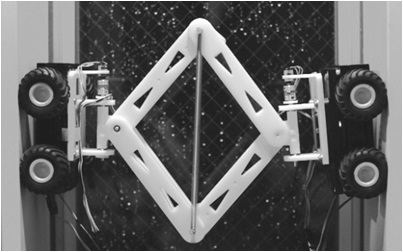
start from 2010
GoStuckは、人間が侵入できない狭い空間(たとえば、下水管や建物間の小さい隙間)のためのウォールクライミングロボットです。このロボットは、2つの駆動部とそれらの間のパンタグラフで構成されており、ロボットが落ちないように壁に押し付け力を発生させています。パンタグラフには、ある程度の押し付け力を与えるために、2種類のスプリングが取り付けられています。提案する機構は、滑らかな動きを成す為に一定の押し付け力で壁間距離の変化に受動的に適応することができます。
+
A. Ariga, T. Yamaguchi, S. Hashimoto, “Passively Adaptable Wall Climbing Robot in Narrow Space,” Journal of Robotics and Mechatronics, vol. 23, No. 6, pp.1055-1065, Dec. 2011.
A. Ariga, T. Kobayashi, T. Yamaguchi, S. Hashimoto, “Wall Climbing Robot in Narrow Space with Pantograph-type Structure,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2010), pp.1507-1512, China, Dec. 2010.
A. Ariga, T. Yamaguchi, S. Hashimoto, “Passively Adaptable Wall Climbing Robot in Narrow Space,” Journal of Robotics and Mechatronics, vol. 23, No. 6, pp.1055-1065, Dec. 2011.
A. Ariga, T. Kobayashi, T. Yamaguchi, S. Hashimoto, “Wall Climbing Robot in Narrow Space with Pantograph-type Structure,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2010), pp.1507-1512, China, Dec. 2010.
GreenBattery
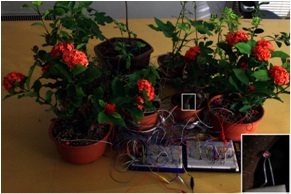
start from 2011
植物の一部に金属電極を挿入し、他方の金属電極を土壌に入れると、2つの電極間には電位差が生じます。植物は土よりもポテンシャルが低くなっています。ある植物と隣接する土壌との間で生じる電圧は数百mVと小さく、電流は数百nAと極めて小さいです。しかし、電気回路を起動するために必要な電圧および電流はV、およびμAオーダーが必要です。植物と土壌との間で生じる電位差を電力供給として使用する場合、非常に低いワット数で動作できるナノスケールの電気装置を開発する必要があります。この研究では、直列-並列接続による10個のポットプラントからなる新たなグリーン電池を提案します。開発されたバッテリは、おおよそ3Vと3μAを生成できます。発生した植物の動力によって九づ宇する個別半導体部品で構成されたLED点滅回路を設計して、実験によってその性能を確認できました。
T. Yamaguchi and S. Hashimoto, “A Green Battery by Pot Plants Power,” IEEJ Transactions on Electronics, Information and Systems, vol.7, no. 4, Jul. 2012.
T. Yamaguchi and S. Hashimoto, “A Green Battery by Pot Plants Power,” IEEJ Transactions on Electronics, Information and Systems, vol.7, no. 4, Jul. 2012.
Intra-oral Interface
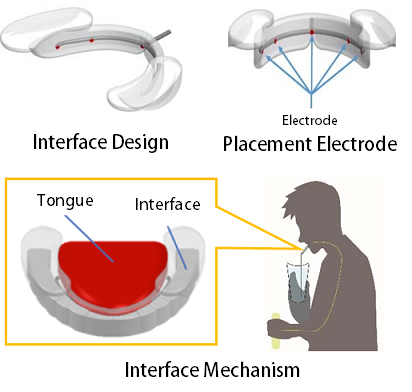
start from 2015
このインターフェースは、電気刺激を利用して連続的に味覚を変化させます。近年、塩分や糖分の過剰摂取による生活習慣病の健康被害が増加しています。この問題に対し、食器を介して食べ物や飲み物へ電気刺激を与えることにより、味を制御する研究があります。しかし、咀嚼中に味覚を変化させることはできません。私たちは、満足館を得るためには咀嚼中に味が変化しなければいけないと考えています。本研究では、電気刺激を用いて連続的に味覚を変化させる口腔内インターフェースを開発します。そこで、電極の位置と面積、前処理による舌の感度の変化を測定する実験を行いました。次に、この実験結果を考慮してインターフェースを開発しました。このインターフェースを使用して行われた味の質に関する実験により、提案されたインターフェースの有効性を確認できました。
K. Tsukamoto, T. Yamaguchi, An Intra-Oral Interface to Affect a Taste Change Continuously by Using Electrical Stimulation with Periodic Intervals, SICE Journal of Control, Measurement, and System Integration, vol.10, no.3, pp.214-221, May 2017.
K. Tsukamoto, T. Yamaguchi, Effective support of taste sense with intra-oral interface by drinking action detection, In Proceedings of IEEE/SICE International Symposium on System Integration (SII), pp.571-576, Dec. 2017.
K. Tsukamoto, T. Yamaguchi, An Intra-Oral Interface to Affect a Taste Change Continuously by Using Electrical Stimulation with Periodic Intervals, SICE Journal of Control, Measurement, and System Integration, vol.10, no.3, pp.214-221, May 2017.
K. Tsukamoto, T. Yamaguchi, Effective support of taste sense with intra-oral interface by drinking action detection, In Proceedings of IEEE/SICE International Symposium on System Integration (SII), pp.571-576, Dec. 2017.
Hammering Test Support System
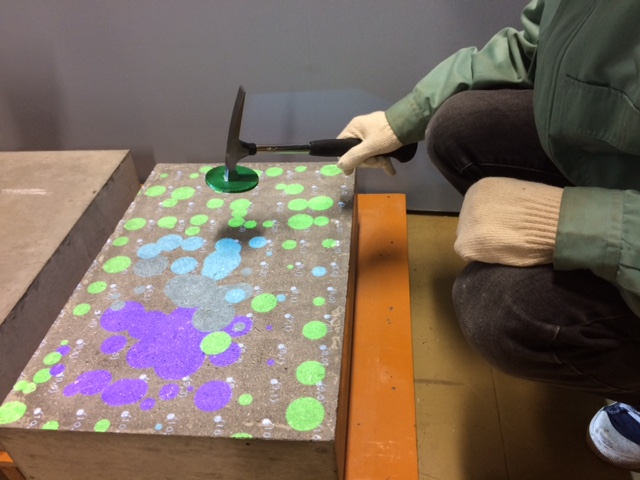
start from 2016
打音検査は、コンクリート構造物の非破壊検査法として広く用いられています。打音検査は、大量かつ広いコンクリート面を検査しなければならないので、人にかかる負担と時間の低減が重要です。このシステムは、診断結果をコンクリートの表面に直接表示することによって検査を支援します。ハンマーの打撃位置を検出し、打撃音を解析、リアルタイムでマッピングすることによって、打撃位置におけるコンクリート表面の解析結果を示します。
K. Hagiwara, T. Yamaguchi, A Method for Supporting Hammering Test by Visualization of Defect Diagnosis on the Concrete Surfaces, In Proceedings of the SICE Annual Conference 2017, pp.986-991, Sep. 2017.
K. Hagiwara, T. Yamaguchi, A Method for Supporting Hammering Test by Visualization of Defect Diagnosis on the Concrete Surfaces, In Proceedings of the SICE Annual Conference 2017, pp.986-991, Sep. 2017.
Grass Cutting Robot on Steep Slope

start from 2017
山間地域の農業は,日本の耕作面積の約4割を占める一方で,その作業の多くを斜面で行う必要があり,作業の負荷やコストが課題となっている.本研究では,中山間地域の斜面上における除草作業の負担を軽減するため,中山間地域の斜面上における除草作業の支援を目的とした,ロボット除草作業支援システムの開発に取り組んでいる.
Crack Inspection Support

start from 2018
本研究では距離センサによる3Dデータのリアルタイム作成と同時にひび割れの自動検出,及びその検出結果画像の実構造物上における位置を画像による特徴マッチングによって推定し3Dデータ上へ投影,また,MRによってその3Dデータを提示することによるひび割れ検査の支援システムを提案する.提案手法では,距離センサとRGBカメラを搭載したMRHMD(Mixed Reality Head Mounted Display)と高解像度カメラを用いたハンズフリーで実用的なシステムを提案する.
Palatability Sensing
start from 2018
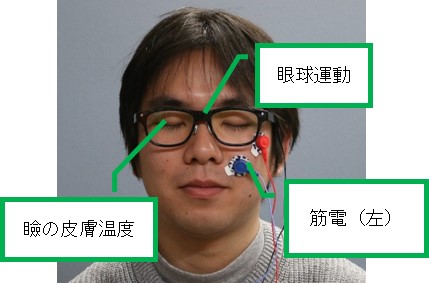
日々の精神状態を定量計測できると人や日によらず評価尺度が一定であるため、自分自身や他者の精神状態を適切に把握できることが期待されます。精神状態を直接定量計測することは困難であるため、人の精神状態と関係のある主観的「おいしさ」に着目しました。本研究では全ての味覚に対して計測可能である日常生活で利用可能な主観的「おいしさ」定量計測手法の研究を行うことにより、精神状態の定量計測手法の確立することで、日々の生活の中で自分自身や他者の精神状態を適切に把握できる技術確立を目指しています。