About Us
Our Vision – Learn with Passion!
本研究の目指すところは,身体を含んだ人間の機能と感覚の工学的な知見に基づいて, 人間―機械,機械―機械,人間―人間の新しい関係を築くことにより, 安全かつ安心な社会環境を実現することです。
これまで,視覚,聴覚,体性感覚などに関連するソフトウェア・ハードウェアの研究を行ってきています. 視覚情報として画像信号を扱った画像処理と画像計測手法の研究, 聴覚情報として音響信号を用いた音響計測や音響表現の研究, そして体性感覚情報として身体計測を行うことで身体表現の研究を推進してきており, さらにはこれらに付随した移動ロボット制御やコミュニケーション技術などの研究開発を行っています。
これらのシステムを構築する上で不可欠な計測技術は, マイクロコンピュータを応用することでセンシング技術として飛躍的に進歩していますが, システムに要求される精度と速度を考慮した適切なセンシング手法の選択や, センシングデータの情報処理が必要となります。 さらには,そのシステムが人の介在する場所での適用か否かによっても,アプローチの仕方が異なります。
そこで,本研究では建造物などの人間の介在が困難な場所において, 計測・検査を自動化する自動計測ロボットの研究(人間―機械,機械―機械の関係の明確化)と, 人間が常に介在している状況である対面コミュニケーション計測の研究(人間―機械,人間―人間の関係の明確化)に注目しており, これらの研究を社会に還元できる技術革新を狙っています。
project
一人称メディア技術
人間中心型IT技術である一人称ビジョンに加えオーディオ等を包括した一人称メディアの確立を目指し 人間同士のコミュニケーションの実時間計測やウェアラブルデバイス等の研究開発を行います。
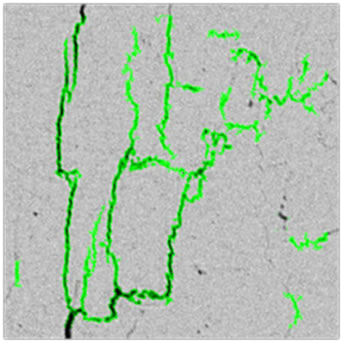
実応用画像処理
自動画像解析の診断アプリケーションとして,画像処理を用いたひび割れ検査の自動化手法など, 産業への実応用をテーマとした研究を行います。
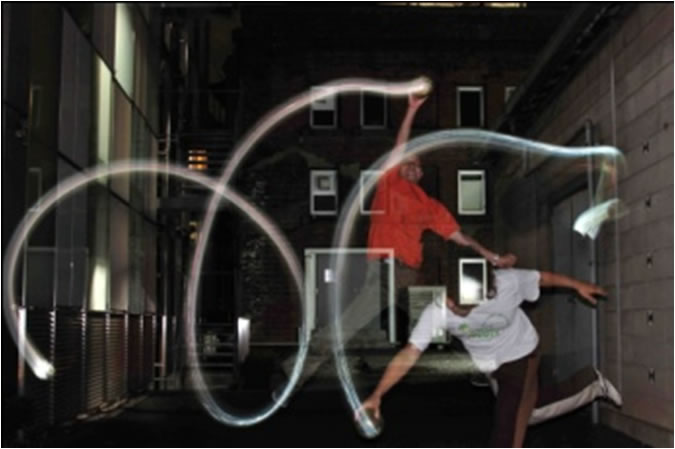
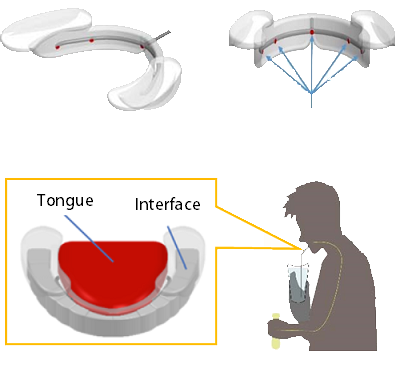
身体的メディアインタフェース
人間の身振り手振りからメディア制御を実現するインタフェースの研究開発と, 人間の身体表現の創出による新しいコミュニケーション形態の創造を目指します。

ロボティクス応用
人間の侵入が困難な場所において作業するロボットに着目し, 環境に適したロボット設計や作業ロボットの安全性などを考慮したロボット技術の応用開発を行います。
