Research
TwinkleBall

start from 2008
TwinkleBall is a ball-shaped interface for embodied sound media. The sound is generated by grasping force and human motion.
The sounds generated by the traditional digital musical instruments are dependent on the physical shape of the musical
instruments. The freedom of the musical performance is restricted by its structure. Therefore, the sounds cannot be
generated with the body expression like the dance. We developed a ball-shaped interface, TwinkleBall, to achieve the
free-style performance. The mechanism of TwinkleBall is as follows: 1) a photo sensor is embedded in the translucent
rubber ball to detect the grasping force which is translated into the luminance intensity for processing, 2) an accelerometer
is also embedded in the interface for motion sensing. By using these sensors, performer can control the note and tempo
by varying grasping force and motion respectively. The features ofTwinkleBall are luminous, ball-shaped, wireless,
and handheld size. As a result,TwinkleBall is able to generate the sound from the body expression such as dance.
Yamaguchi, T. Kobayashi, A. Ariga, S. Hashimoto, “TwinkleBall: A Wireless Musical Interface for Embodied Sound Media,” Proc. of New Interfaces for Musical Expression (NIME 2010), pp.116-119,Australia, Jun. 2010.
T. Yamaguchi, S. Hashimoto, “Grasping Interface with Photo Sensor for a Musical Instrument,” Proc. of the 13th International Conference on Human-Computer Interaction (HCI International 2009), pp. 542–547, USA, Jul., 2009.
Yamaguchi, T. Kobayashi, A. Ariga, S. Hashimoto, “TwinkleBall: A Wireless Musical Interface for Embodied Sound Media,” Proc. of New Interfaces for Musical Expression (NIME 2010), pp.116-119,Australia, Jun. 2010.
T. Yamaguchi, S. Hashimoto, “Grasping Interface with Photo Sensor for a Musical Instrument,” Proc. of the 13th International Conference on Human-Computer Interaction (HCI International 2009), pp. 542–547, USA, Jul., 2009.
AttractiveEye

start from 2008
AttractiveEye is a unique robotic eye which can be used to determine the focal object that a robot is looking at. Humans
have the visual input mechanism but do not have the output mechanism concerning the visual signal except gestures.
AttractiveEyecan communicate information regarding the color of an object by changing its color to match that of the
object. From the color of this robot, we can determine the focal object that it is looking at. The structure of AttractiveEye
is quite simple by consisting of luminous devices and a camera sensor. Through the human-robot interaction experiment,
we confirmed that human-robot interaction can be made easier by using AttractiveEye.
T. Yamaguchi, S. Hashimoto, “AttractiveEye: Augmented Gaze Representation for “What is the robot looking at?””, Proc. of IEEE International Conference on Robotics and Automation (ICRA2009), pp.2289-2294, Japan, May 2009.
T. Yamaguchi, S. Hashimoto, “AttractiveEye: Augmented Gaze Representation for “What is the robot looking at?””, Proc. of IEEE International Conference on Robotics and Automation (ICRA2009), pp.2289-2294, Japan, May 2009.
Visual Inspection System on the Concrete Surface

start from 2004
As a diagnostic application of automated image analysis, crack inspection using image processing and image measurement is
proposed. During maintenance and diagnosis of concrete surfaces, crack inspection on the surfaces is important to ensure
the safety of these structures. The crack width is a particularly important parameter used to evaluate the durability
and degradation of concrete surfaces. Although many applications and systems have been developed for crack inspection,
it is not easy to use these systems to measure crack width accurately in practical use. We developed automatic crack
detection and crack measurement methods. In order to measure the crack width in exact scale, we fix a crack scale on
the concrete surface, which is anchored on a photographable plate. By performed experiments on a real concrete surface,
we evaluated the performance of the system and validate its reliability in practical use.
T. Yamaguchi, S. Hashimoto, “Fast crack detection method for large-size concrete surface images using percolation-based image processing,” Machine Vision and Applications, Feb. 2009.
T. Yamaguchi, S. Nakamura, R. Saegusa, S. Hashimoto, “Image-based crack detection for real concrete surface”, IEEJ Transactions on Electrical and Electronic Engineering, Vol.3, No.1, pp.128-135, Jan. 2008.
T. Yamaguchi, S. Hashimoto, "Practical image measurement of crack width for real concrete structure," Electronics and Communications in Japan, vol.92 Iss.10, pp.1-12, Sep. 2009.
T. Yamaguchi, S. Hashimoto, “Image processing based on percolation model,” IEICE Transactions on Information and Systems, Vol.E89-D, No.7, pp.2044-2052, Jul. 2006.
T. Yamaguchi, K. Suzuki, P. Hartono, S. Hashimoto, “Percolation approach to Image-based crack detection,” Proceedings of the 7th international conference on Quality Control by Artificial Vision (QCAV2005), pp.291-296, Japan, May 2005.
T. Yamaguchi, S. Hashimoto, “Fast crack detection method for large-size concrete surface images using percolation-based image processing,” Machine Vision and Applications, Feb. 2009.
T. Yamaguchi, S. Nakamura, R. Saegusa, S. Hashimoto, “Image-based crack detection for real concrete surface”, IEEJ Transactions on Electrical and Electronic Engineering, Vol.3, No.1, pp.128-135, Jan. 2008.
T. Yamaguchi, S. Hashimoto, "Practical image measurement of crack width for real concrete structure," Electronics and Communications in Japan, vol.92 Iss.10, pp.1-12, Sep. 2009.
T. Yamaguchi, S. Hashimoto, “Image processing based on percolation model,” IEICE Transactions on Information and Systems, Vol.E89-D, No.7, pp.2044-2052, Jul. 2006.
T. Yamaguchi, K. Suzuki, P. Hartono, S. Hashimoto, “Percolation approach to Image-based crack detection,” Proceedings of the 7th international conference on Quality Control by Artificial Vision (QCAV2005), pp.291-296, Japan, May 2005.
SIEN

start from 2007
SIEN represents a novel safety measure concept in making climbing service robots feasible, e.g., in keeping them from falling
off a wall due to concavity, convexity, or insufficient adhesion. The wall climbing-support robot SIEN we developed
uses a telescopic arm to support itself. The arm has a joint with sensors to detect robot speed and direction of movement.
SIEN follows and supports the climbing robot based on feedback using detected force. SIEN enabled the robot to climb
walls reliably and safely, as confirmed in experimental results.
T. Yamaguchi, Y. Sorioka, S. Paku, S. Hashimoto, "SIEN: Telescopic-Arm Climbing-Support Robot," Journal of Robotics and Mechatronics, vol.21, no.5, pp.621-627, Nov. 2009.
Y. Sorioka, T. Yamaguchi, S. Hashimoto, “Development of a Telescopic-Arm Type, Climbing Support Robot,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2008), pp.1818-1823, Thailand, Dec. 2008.
T. Yamaguchi, Y. Sorioka, S. Paku, S. Hashimoto, "SIEN: Telescopic-Arm Climbing-Support Robot," Journal of Robotics and Mechatronics, vol.21, no.5, pp.621-627, Nov. 2009.
Y. Sorioka, T. Yamaguchi, S. Hashimoto, “Development of a Telescopic-Arm Type, Climbing Support Robot,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2008), pp.1818-1823, Thailand, Dec. 2008.
GoStuck
start from 2010
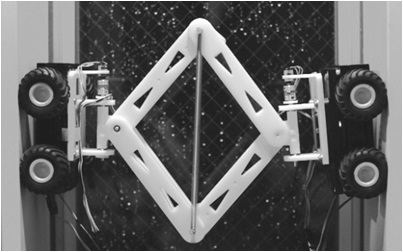
GoStuck represents a wall-climbing robot for a narrow space that is not accessible for humans, such as a sewer pipe and small
gaps between buildings. The proposed robot consists of two driving parts and a pantagraph between them that generates
a pushing force against the walls to prevent the robot from falling down. Two different kinds of springs are installed
on the pantograph in order to provide certain amount of the pushing force. The proposed mechanism can passively adapt
to the changes in the interwall distance with a constant pushing force to achieve a smooth movement.
A. Ariga, T. Yamaguchi, S. Hashimoto, “Passively Adaptable Wall Climbing Robot in Narrow Space,” Journal of Robotics and Mechatronics, vol. 23, No. 6, pp.1055-1065, Dec. 2011.
A. Ariga, T. Kobayashi, T. Yamaguchi, S. Hashimoto, “Wall Climbing Robot in Narrow Space with Pantograph-type Structure,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2010), pp.1507-1512, China, Dec. 2010.
A. Ariga, T. Yamaguchi, S. Hashimoto, “Passively Adaptable Wall Climbing Robot in Narrow Space,” Journal of Robotics and Mechatronics, vol. 23, No. 6, pp.1055-1065, Dec. 2011.
A. Ariga, T. Kobayashi, T. Yamaguchi, S. Hashimoto, “Wall Climbing Robot in Narrow Space with Pantograph-type Structure,” Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO2010), pp.1507-1512, China, Dec. 2010.
GreenBattery
start from 2011
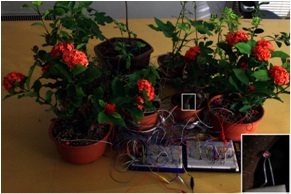
When the metal electrode is inserted to the part of plant, and then the other metal electrode is put in the soil, the electrical
potential difference generates between the two electrodes. The plant has a lower potential than the soil. The generated
voltage from the electrical potential difference between one plant and the adjacent soil becomes small as several hundred
mV, and the current is extremely low as several hundred nA. However, in order to boot up some electrical circuits,
the voltage and current need V and μA order, respectively. If the electrical potential difference between one plant
and the soil is used to power supply, it is necessary to develop the nanoscale electrical device which can work with
extremely low wattage. Here we report a novel green battery composed of 10 pot plants by serial-parallel connections.
The developed battery can generate almost 3V and 3μA to drive the electric devices. We designed the LED blinking circuit
composed of discrete semiconductor parts which is driven by the generated plants power, and confirmed its performance
through the experiments.
T. Yamaguchi and S. Hashimoto, “A Green Battery by Pot Plants Power,” IEEJ Transactions on Electronics, Information and Systems, vol.7, no. 4, Jul. 2012.
T. Yamaguchi and S. Hashimoto, “A Green Battery by Pot Plants Power,” IEEJ Transactions on Electronics, Information and Systems, vol.7, no. 4, Jul. 2012.
Intra-oral Interface
start from 2015
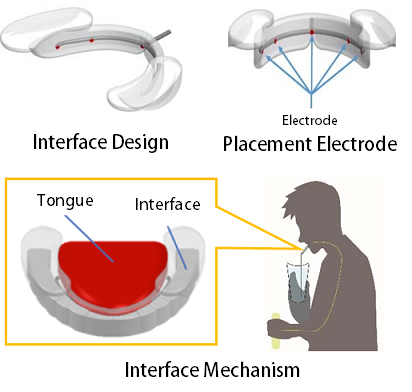
This Intra oral Interface effect a change taste continuously by using electrical stimulation. Recently, it is increased health
about lifestyle diseases due to intake of high saly and sugar. For this problem, there are some studies to control
the taste by electrical stimulation to food and drink through the tableware. However, it is not possible to realize
a change of taste during the chewing of food and drink. Therefore, we consider that the change of taste is also required
during the chewing to achieve the satisfied consumption. In this study, we develop an intra-oral interface to effect
a change taste continuously by using electrical stimulation. At fast, we performed experiments to measure the sensitivity
of tongue by position and area of electrode, preliminatiry. Then, we developed interface to take into account this
experiments results. Through the experiments about quality of taste by using the developmed interface, we confirmed
effectiveness of the proposed interface.
K. Tsukamoto, T. Yamaguchi, An Intra-Oral Interface to Affect a Taste Change Continuously by Using Electrical Stimulation with Periodic Intervals, SICE Journal of Control, Measurement, and System Integration, vol.10, no.3, pp.214-221, May 2017.
K. Tsukamoto, T. Yamaguchi, Effective support of taste sense with intra-oral interface by drinking action detection, In Proceedings of IEEE/SICE International Symposium on System Integration (SII), pp.571-576, Dec. 2017.
K. Tsukamoto, T. Yamaguchi, An Intra-Oral Interface to Affect a Taste Change Continuously by Using Electrical Stimulation with Periodic Intervals, SICE Journal of Control, Measurement, and System Integration, vol.10, no.3, pp.214-221, May 2017.
K. Tsukamoto, T. Yamaguchi, Effective support of taste sense with intra-oral interface by drinking action detection, In Proceedings of IEEE/SICE International Symposium on System Integration (SII), pp.571-576, Dec. 2017.
Hammering Test Support System
start from 2016
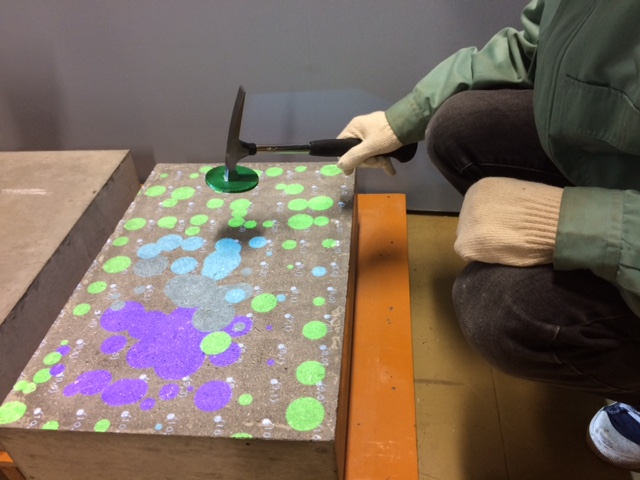
Hammering test is widely used as a non-destructive testing method for concrete structures. In hammering test, it is important
for reducing human's burden and time-consumption because there are large and a lot of concrete surfaces which should
be inspected. This system supports hammering test by displaying the diagnostic results immediately on the concrete
surface. The method detects the hitting positions of hammer, analyzes the acoustic data of the hitting sounds, and
shows the analysis results at the detected hitting position on the concrete surface by projection mapping in real time.
K. Hagiwara, T. Yamaguchi, A Method for Supporting Hammering Test by Visualization of Defect Diagnosis on the Concrete Surfaces, In Proceedings of the SICE Annual Conference 2017, pp.986-991, Sep. 2017.
K. Hagiwara, T. Yamaguchi, A Method for Supporting Hammering Test by Visualization of Defect Diagnosis on the Concrete Surfaces, In Proceedings of the SICE Annual Conference 2017, pp.986-991, Sep. 2017.
Grass Cutting Robot on Steep Slope

start from 2017
The mowing is one of the dangerous works for farmers
because it is usually taken place on steep slope. A multi-copter-typed mobile robot was developed
in this study. This robot is able to maintain its posture stable on over 80 degree
slope.
Crack Inspection Support

start from 2018
In this study, we developed a crack inspection support system using HMD(Head Mounted Display). The proposed system realized building 3D models by spatial perception mapping, detecting and matching features of cracks, and superimposing and projecting crack detected image onto real structure surface in MR space.
Palatability Sensing

start from 2018
Subjective palatability quantitative sensing makes us understand own or another mental condition correctly because the quantitative scale does not depend on the day and the individuals. However, it is difficult for us to measure mental condition directly. Then we focus on subjective palatability because it is related to mental condition. We aim to establish the technology of correct understanding own and another mental condition by the method of subjective palatability quantitative sensing for all taste stimulation in our life.